








光纖激光焊接機視覺定位系統(tǒng)集成方案
來源:博特精密發(fā)布時間:2025-11-17 01:40:00
隨著工業(yè)制造向高精度、高效率方向發(fā)展,光纖激光焊接技術因其能量密度高、熱影響區(qū)小、焊接速度快等優(yōu)勢,在汽車制造、航空航天、精密電子等領域得到廣泛應用。然而,傳統(tǒng)焊接依賴人工定位,易受操作者經(jīng)驗影響,導致焊接質(zhì)量不穩(wěn)定。視覺定位系統(tǒng)通過圖像采集與處理,實現(xiàn)對工件位置的自動識別與定位,顯著提升焊接精度與自動化水平。

本方案旨在設計一套集成于光纖激光焊接機的視覺定位系統(tǒng),解決高精度焊接中的定位難題。
一、系統(tǒng)組成與工作原理
1.硬件組成:
-工業(yè)相機:采用高分辨率CCD或CMOS相機(如500萬像素以上),搭配遠心鏡頭以減少圖像畸變,確保采集圖像清晰。
-光源系統(tǒng):使用LED環(huán)形光源或同軸光源,提供均勻照明,增強工件特征對比度,減少反光干擾。
-圖像處理單元:集成高性能工控機(如Inteli7處理器、8GB內(nèi)存),配備圖像采集卡,用于運行視覺算法。
-激光焊接機:選用光纖激光器(如1kW以上功率),配合振鏡系統(tǒng)實現(xiàn)快速掃描焊接。
-通信模塊:通過EtherCAT或Profinet協(xié)議實現(xiàn)視覺系統(tǒng)與焊接機PLC的實時數(shù)據(jù)交換。
2.軟件功能:
-圖像采集與預處理:通過相機采集工件圖像,進行灰度化、濾波去噪、邊緣增強等處理。
-特征提取與匹配:利用模板匹配或深度學習算法(如CNN)識別焊縫位置、角度等特征。
-坐標標定與轉(zhuǎn)換:通過手眼標定(Eye-to-Hand模式)將圖像坐標轉(zhuǎn)換為機器人坐標系,定位精度可達±0.1mm。

-實時控制:視覺系統(tǒng)將定位數(shù)據(jù)發(fā)送至焊接機,動態(tài)調(diào)整激光焦點路徑,實現(xiàn)自適應焊接。
3.工作流程:
-工件上料后,相機采集圖像并傳輸至處理單元。
-軟件提取焊縫特征,計算位置偏差。
-系統(tǒng)生成校正指令,驅(qū)動焊接頭移動至目標位置。
-激光器按預設參數(shù)完成焊接,同時視覺系統(tǒng)實時監(jiān)測焊縫質(zhì)量。
二、系統(tǒng)優(yōu)勢
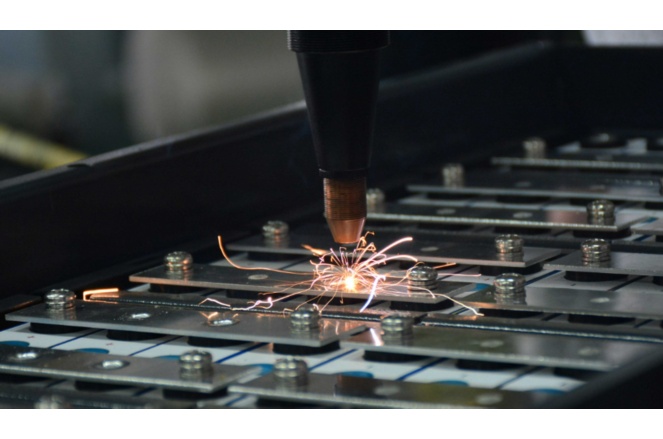
1.高精度定位:視覺定位精度達0.05mm,適用于微細焊縫(如電池極耳焊接)。
2.自適應能力強:可兼容不同工件形狀,通過軟件更新模板應對產(chǎn)品換型。
3.效率提升:定位時間小于0.5秒,較人工定位效率提高50%以上。
4.質(zhì)量追溯:集成數(shù)據(jù)記錄功能,保存焊接參數(shù)與圖像,支持質(zhì)量分析。
三、應用場景
-汽車零部件:如齒輪、傳感器外殼的密封焊接。
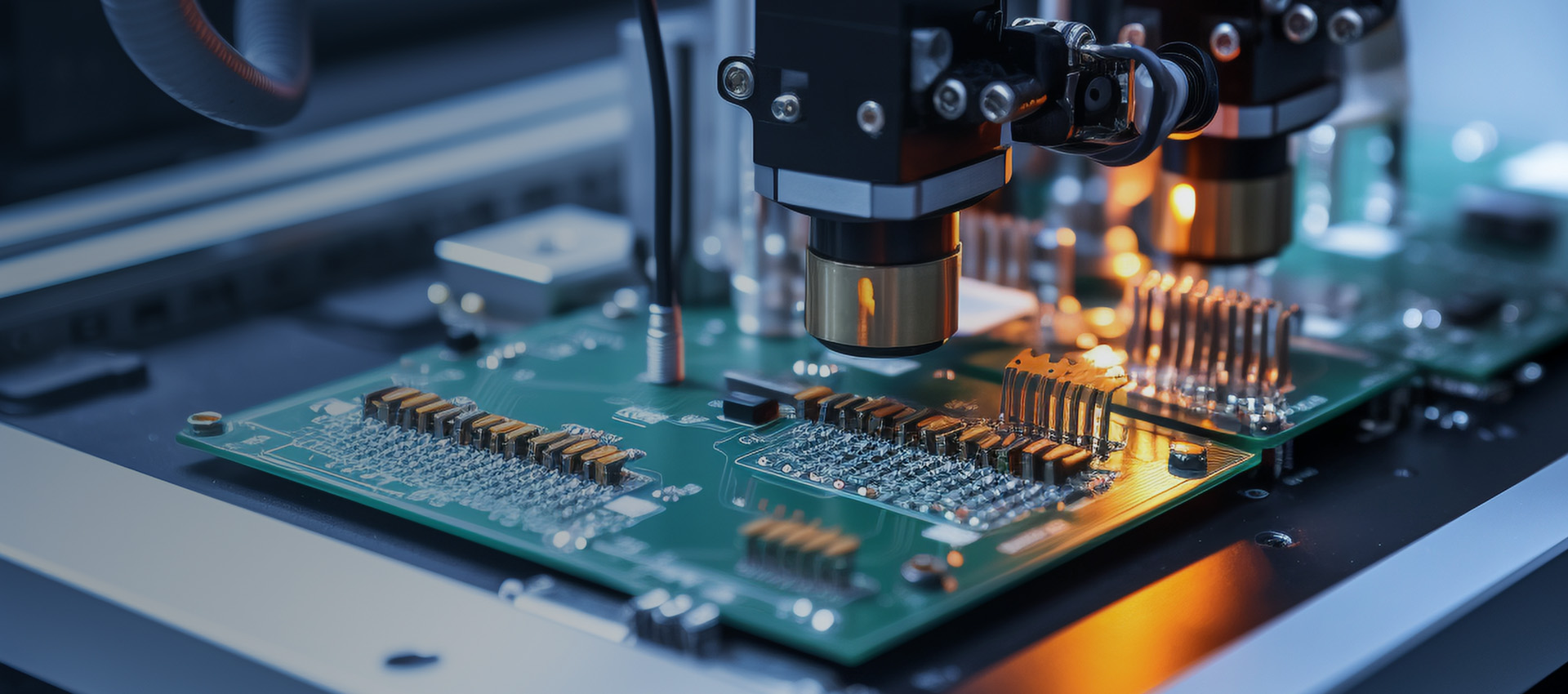
-電子元器件:PCB板連接點、芯片引腳焊接。
-醫(yī)療器械:內(nèi)窺鏡支架、手術器械的精密焊接。
四、實施步驟
1.需求分析:明確工件材料、焊縫規(guī)格及精度要求。
2.硬件選型:根據(jù)現(xiàn)場環(huán)境選擇防塵、防震相機與光源。
3.系統(tǒng)集成:安裝硬件并開發(fā)定制化軟件,完成手眼標定。
4.測試驗證:使用標準工件進行重復定位測試,優(yōu)化算法參數(shù)。
5.培訓與維護:提供操作培訓,建立定期校準與維護制度。
五、總結(jié)
本方案通過集成視覺定位系統(tǒng)與光纖激光焊接機,實現(xiàn)了焊接過程的智能化與高精度化,有效降低人工誤差,提升生產(chǎn)效益。未來可結(jié)合AI算法進一步優(yōu)化復雜環(huán)境下的識別能力,推動智能制造升級。
FAQ問答
Q1:視覺定位系統(tǒng)的精度受哪些因素影響?如何提升?
A1:精度主要受相機分辨率、鏡頭畸變、光照條件及標定算法影響。提升方法包括:選用高分辨率相機與遠心鏡頭、優(yōu)化光源均勻性、定期進行手眼標定,并采用亞像素處理算法提高邊緣檢測精度。
Q2:系統(tǒng)能否適應反光或深色工件?
A2:可以。通過調(diào)整光源角度(如采用低角度環(huán)形光)或使用偏振濾光片減少反光;對于深色工件,可增加光源強度或采用紅外相機增強圖像對比度。軟件層面可通過HDR成像或多曝光融合技術處理高動態(tài)范圍場景。
Q3:視覺系統(tǒng)與焊接機的響應延遲如何解決?
A3:延遲主要來自圖像處理與通信。解決方案包括:采用實時操作系統(tǒng)(如RT-Linux)、優(yōu)化算法復雜度(如硬件加速)、使用千兆以太網(wǎng)或EtherCAT實現(xiàn)毫秒級數(shù)據(jù)傳輸,并預設運動預測模型補償延遲。
Q4:系統(tǒng)維護需要注意哪些事項?
A4:定期清潔相機鏡頭與光源防止污漬影響;每月校驗一次坐標標定;更新軟件版本以修復漏洞;檢查電纜連接避免松動;存儲環(huán)境溫度建議保持在0-40℃,濕度低于80%。
Q5:如何應對工件尺寸或型號變更?
A5:系統(tǒng)支持柔性配置。通過軟件加載新工件的CAD模板或快速采集樣本圖像更新數(shù)據(jù)庫;對于批量換型,可預設多組參數(shù)方案,一鍵切換。此外,基于深度學習的系統(tǒng)可通過少量樣本自適應訓練,無需重新標定。
推薦新聞
-
小型激光切割機行業(yè)應用案例
小型激光切割機作為一種高效、精密的加工工具,近年來在多個行業(yè)中得到了廣泛應用。它利用高能量...
2025-10-06 -
紫外激光打標機 355nm 冷加工 多材質(zhì)高精度雕刻設備
355nm紫外激光打標機:冷加工賦能多材質(zhì)高精度雕刻在精密制造領域,激光打標技術的精準度與材質(zhì)...
2026-01-12 -
CCD視覺定位加持!博特精密光纖激光打標機助力電子制造業(yè)效率翻倍
CCD視覺定位!博特精密光纖激光打標機助力電子制造業(yè)在電子制造業(yè)邁向高精度、自動化、柔性化生...
2026-01-10 -
博特激光視覺打標機用戶真實評價
好的,這是一篇根據(jù)市場反饋、用戶訪談和技術評測等綜合信息整理出的,以第一人稱視角撰寫的“博...
2024-09-27 -
電子連接器行業(yè)CCD視覺打標精度提升方案
一根Pin針彎曲0.015mm,肉眼難辨,傳統(tǒng)2D視覺系統(tǒng)也難以察覺,卻導致整批連接器焊接不良,最終賠...
2025-09-23 -
碳化硅切割速度低下:傳統(tǒng)機械鋸切效率<1mm/s
碳化硅(SiC)因其高硬度、高導熱性、耐高溫和優(yōu)異的化學穩(wěn)定性,被廣泛應用于功率半導體、LED襯...
2025-06-09 -
廣東視覺打標機實力廠家探析:技術與產(chǎn)業(yè)融合的制造高地
在工業(yè)標識領域,視覺打標機以其高精度、高效率和高靈活性的特點,已成為精密制造、電子元件、醫(yī)...
2024-09-27 -
華東地區(qū)視覺打標機哪家強?深度解析市場格局與選擇策略
華東地區(qū),作為中國制造業(yè)的核心引擎,匯聚了從電子半導體、汽車零部件到醫(yī)療器械、精密加工等眾...
2024-09-27
